たとえば対向2車線の一般的な道路で、1車線をつぶして、地中に埋まっている水道管やガス管、電気ケーブルを修理・点検・交換するという場合、思い浮かべるのが、仮設信号機と車両誘導員。
工事などで閉鎖した1車線の前後に、仮設信号機を設置し、そこから少し離れた位置に、信号渋滞するクルマを誘導する車両誘導員が立っている。
1車線工事現場の両端に立つ車両誘導員は、トランシバーや誘導灯合図で連絡を取り合いながら、できる限り留めることなくクルマを誘導していく……。
―――こんな車両片側交互通行誘導シーンが、いよいよDXで無人化し、クルマの流れも劇的に進化する日もそう遠くない。
セキュリティーサービスを展開するVOLLMONTホールディングス(東京都青梅市)は、セキュリティ・安全管理の総合展示会「SECURITY SHOW」(東京ビッグサイト3/1〜3/4開催)で、2020年から事業化を進めている歩行者誘導警備ロボット「Comune+ model-1 (コミューンプラス モデルワン)」や、2022年度の本格事業化をめざす片側交互通行誘導ロボット「Comune+ model-2(コミューンプラス モデルツー)」のコンセプトを初公開した。
車両片側交互通行誘導ロボット「Comune+ model-2(コミューンプラス モデルツー)」とは
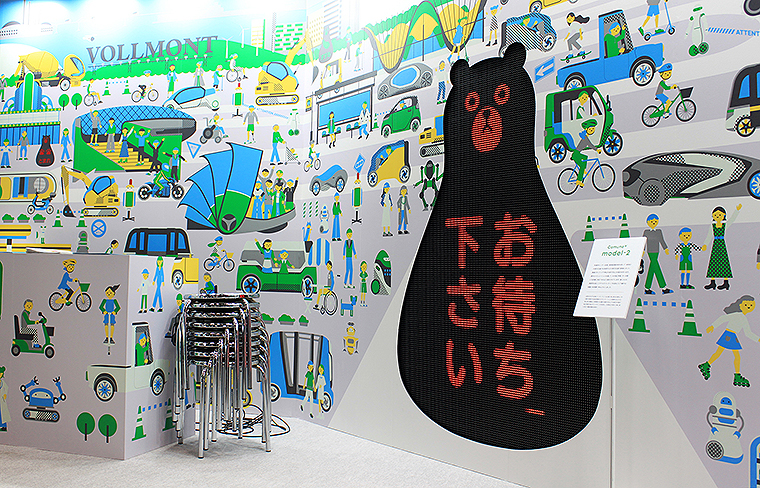
VOLLMONT(フォルモント)が開発をすすめる Comune+ model-2(コミューンプラス モデルツー)は、スマートシティ構想実現へむけた片側交互通行誘導ロボット。
AI・先端的センサー技術と画像認識技術を使い、車両の片側交互通行を最適のタイミングで制御するだけでなく、道路工事のデータをクラウド上で共有することで、交通渋滞の予測精度の向上も図ります。
また、先端的センサー技術と画像認識技術を使い、⾞両の片側交互通行を制御し、最適なタイミングで停⽌や⾛⾏可などの指⽰を実行する。
さらに膨大なシミュレーションを通じ、AIが⾃⼰学習し、万⼀の時にも的確に対応できるよう設計され、遠くからも視認性のいいシグナルやメッセージを送ることで、確かな制動⼒を発揮させていくという。
同社はこの Comune+ model-2 の今後の展開や可能性について、こう伝えている。
「道路の形状や道幅、センターラインの位置、停止線の位置などを自動で認識する道路情報のセグメンテーションの機能を向上させ、都心部の複雑な工事現場でも自動で認識できるような設計をめざす」
「毎日現場で集めたビッグデータを利用し、渋滞発生予測や工事工程に役立つ機能も搭載していく」(フォルモント)
―――またフォルモントは、東京ビッグサイトで開催された SECURITY SHOW 2022 で、この Comune+ model-2 のコンセプトや、今後実装していく予定の機能などについて、こう説明した↓↓↓
交通誘導警備の未来と可能性

VOLLMONTが開発中のシステムは、車両、自転車、人を自動で判断し、それぞれの物体の位置、工事帯からの距離・速度を人よりも正確に検知すできる。
例えば、交通信号機の有無、道路の形状など工事帯の環境を認識することで、交通信号機の変化を事前に予測して最適な誘導を行い、渋滞を回避できる。
また救急車のような緊急車両のサイレン音を認識すると、すべての車両を停止させることも可能。
自ら学習するAIの機能も実現。LiDAR(光による検知と測距)や5G(第5世代移動通信システム)などの新しいテクノロジーを利用できるように、頑強でフレキシブルなシステムをデザインしている。
VOLLMONTが開発中のシステムは、「いままで誰も作ったことのない、新しい交通誘導警備システム」で、このシステムを利用した交通誘導警備の未来に大きな可能性を感じている。
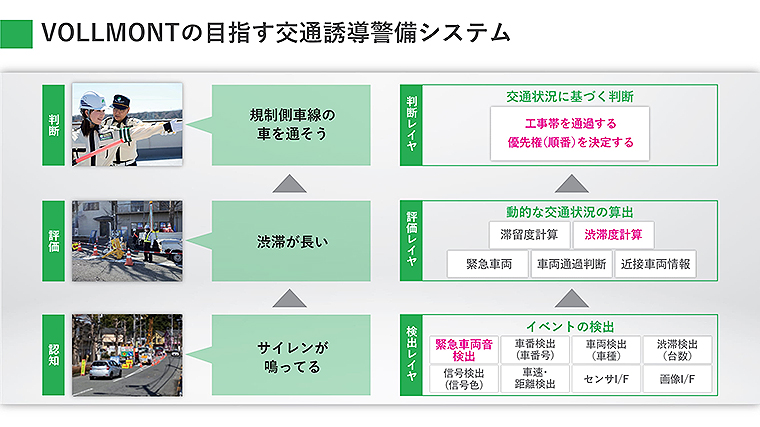
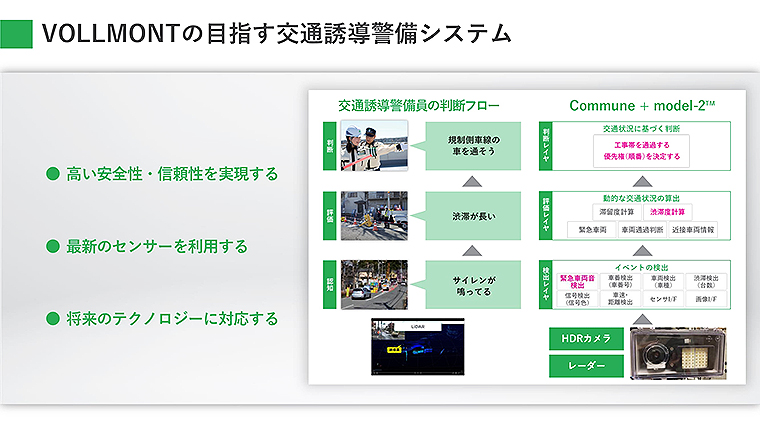
VOLLMONTが目指す交通誘導警備システムのイメージ

すべての工事現場で高い安全性と信頼性を実現するために、交通誘導警備システムはHDR(ハイダイナミックレンジ)対応のカメラ、150メートル先まで見通せるレーダーなど最新のセンサーに加えて、マイクロフォン、温湿度センサー、GPSも搭載。
また、VOLLMONTが開発中のシステムは将来、さらにハイスペックなカメラやレーダーに加えて、LiDARなどの新しいセンサーにも対応することも見据えている。
さらに搭載しているカメラ、レーダー、GPSなどすべてのセンサーから検出されたデータは、イベントとして検出レイヤーに送り込まれる。これは人の目や耳から得た情報を脳に送る機能に相当する。
検出レイヤーから得られた情報は、信号機の予測値、車両までの距離の判定、渋滞度などと抽象化されて、工事現場の状況を評価するための指標に変換される。
これは、交通誘導警備員が渋滞の長さや信号の変化を予測しながら評価をするため情報を集めることに相当する。
交通誘導警備員と同じように、判断レイヤーでは評価レイヤーから送られた各種の評価値を総合的に判断して「進め」「注意」「とまれ」と判断していく。
このように階層化されたシステムデザインを採用することで、フレキシブルで信頼性が高いシステムを実現させるだけではなく、業務処理にもAIの機能を活用することができた。
学習機能を支えるビッグデータをVOLLMONTが独自構築
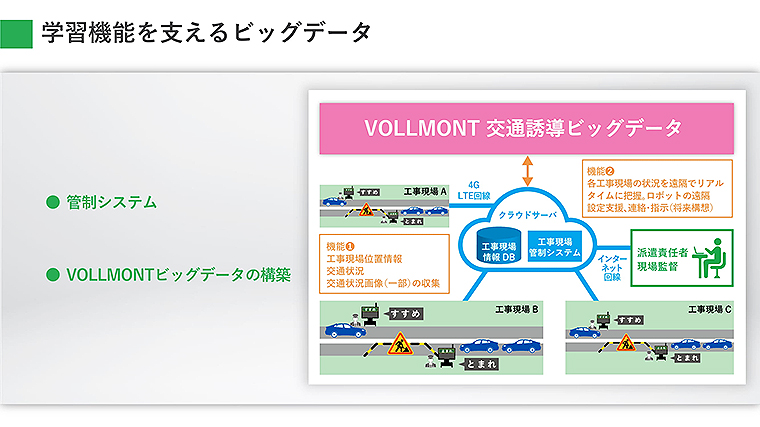
たとえば、VOLLMONTが開発中の交通誘導警備システムが365台導入されれば、交通誘導警備員が1年がかりで経験することを、システムはたったの1日で遂行できるようになる。
そこで、現場に置かれた交通誘導警備システムを管理するために開発した管制システムに、VOLLMONT独自のビッグデータを構築する機能も追加していく。
また、システムで誘導中の車両の動きを記録したムービーファイル、カメラやレーダーから取得したデータや画像認識の結果、システムの判断結果などの膨大なデータをVOLLMONTビッグデータとして蓄積し、将来はAIで学習するための基盤として利用していく。
今後は学習する範囲をさらに拡大し、学習速度を早めることで、日々蓄積されるビッグデータを利用して自ら学習する真のAI業務アプリケーションを開発していく。
交通誘導警備システムとインターアクトできる交通誘導警備シミュレーターも開発
最初の実証実験は、2019年10月23日、東久留米市前沢の工事現場で、カメラ画像による認識機能、ネットワーク機器の接続機能などの基本機能の検証から始まった。
初めてシステムによる片側交互通行誘導を行ったのは2020年05月20日、八王子市館町の工事現場。
以来、片側交互通行システムの実証実験は延べ33回、82時間以上にわたり、すでに2年近く実証実験を繰り返している。
安全性・信頼性を確認するため、長期間にわたる実証実験を展開中のフォルモントは、どのような工事現場でも安全・確実に動作することを確認すべく、任意の工事現場を仮想空間に配置。
この仮想空間を走行する車両が、フォルモントが開発した交通誘導警備システムとインターアクトできる交通誘導警備シミュレーターも開発した。
Comune+(コミューンプラス)システムを管理する管制システムも
交通誘導警備システムを管理するために開発された管制システムは、Comune+(コミューンプラス)Model-1、開発中のModel-2に加え、将来提供するすべての Comune+(コミューンプラス)システムを管理できる。
この管制システムを使い、配置されている交通誘導警備システムの場所や稼働状況などが確認できるだけではなく、道路の形状が認識できないなどの異常事態が起きても、離れた管制室から、まるで現場にいるようにシステムのパラメータを変更し、システムを稼働させることもできるようになる。
「誰もつくったことのないシステム」Comune+ model-2 の今後
最後に、VOLLMONTホールディングス 望⽉武治 代表取締役は、開発中の Comune+ model-2 の今後の展望・ビジョンについてこう伝えた。
「Comune+ model-1 とmodel-2 は現状、別のシステムですが、今後は連携を取れるような形にしていきたいと考えています。とくに model-2 は開発途中なこともあり、model-1 からさらに進んだ機能や技術を搭載予定です」
「そして、工事現場は気候、時間帯、地形、ひとつとして同じ現場がありません。現場に置くだけでそこに適応するシステムがあれば次代の新しい安全・安心を担っていけるものと確信しております。誰もつくったことのないシステムです」
「どうすれば安全・安心で皆さまに喜んでもらえる交通誘導ロボットがつくれるのか。いまでも技術開発やデザイン、システム構築の検討を重ね試行する日々が続いています。そしてこの取り組みに終わりはありません」
◆VOLLMONTホールディングス
https://www.vollmont.co.jp/