測位方法や位置座標管理方法がそれぞれ異なる複数の自律走行ロボットを統合管理したい――――。
そんなニーズに応える実証実験が、愛知県経済産業局ロボット国際大会推進室主催「あいちロボットショーケース」(1月22日~24日)に行われた。
総合ITサービスのTIS(東京都新宿区)は、マルチベンダーロボット管理システム「RoboticBase」を あいちロボットショーケース に出展し、複数ベンダーのロボットの位置を測位し、可視化する実証実験に挑んだ。
TIS のサービスロボット統合管理ソフトウェア RoboticBase は、運搬・清掃・案内・警備など、種類の違うサービスロボットやセンサー、カメラなどのIoTデバイスを統合管理する基本機能を備え、施設管理や企業システム、外部データとの連携などを実現させる。
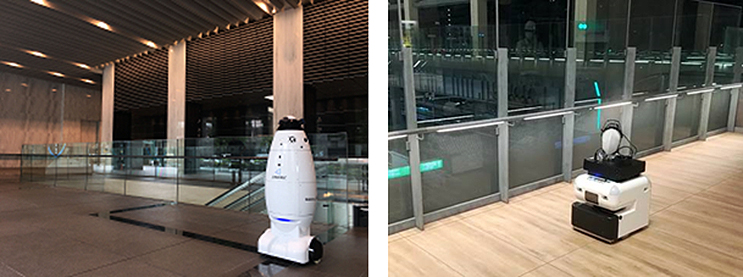
今回の実証実験では、この RoboticBase を活用し、警備ロボット「SQ-2」(SEQSENSE社提供)と除菌ロボット「CLINABO CL02」(日本信号社提供)の2種類のロボットを統合管理。
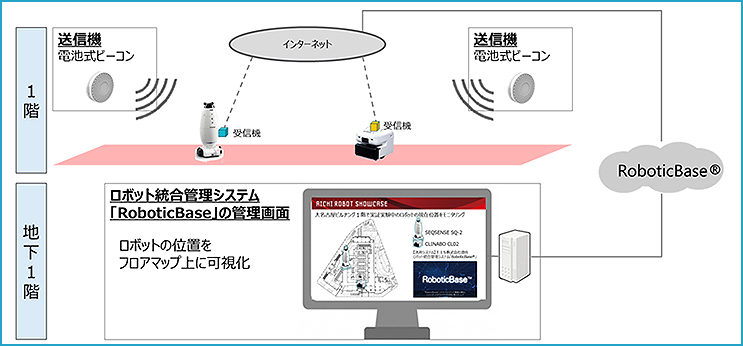
施設内に複数個設置したビーコンで、ロボットの種類を問わない汎用的手法で位置を把握するほか、統合的な管理画面上でロボットの位置を可視化してみせた。
具体的には、大名古屋ビルヂング内にいるこの2種のロボットの位置を、ロボット統合管理システムのフロアマップ上に可視化し、ビル内の除菌作業や警備巡回を実行させた。
今回のロボット測位は、施設内に設置したビーコンから送信される電波をもとに、ロボットに設置する受信機で測位。ロボット位置の可視化は、ロボット統合管理システムでロボット位置情報を統合集約してフロアマップ上にマッピングした。
―――自律走行ロボットが暮らしに入り込む時代、複数種類のロボットを共同運用するシーンでは、導入ロボットごとに個別の管理が必要となるという課題があった。
今回の実証実験では、こうした課題解決にむけ、複数ロボットの統合管理の可能性を示したモデルとして注目を集めた。